Installing & Using VPT
Learn how to install, build and use VPT

Adventures in ray tracing, volumetric rendering, clouds and more...
Learn how to install, build and use VPT
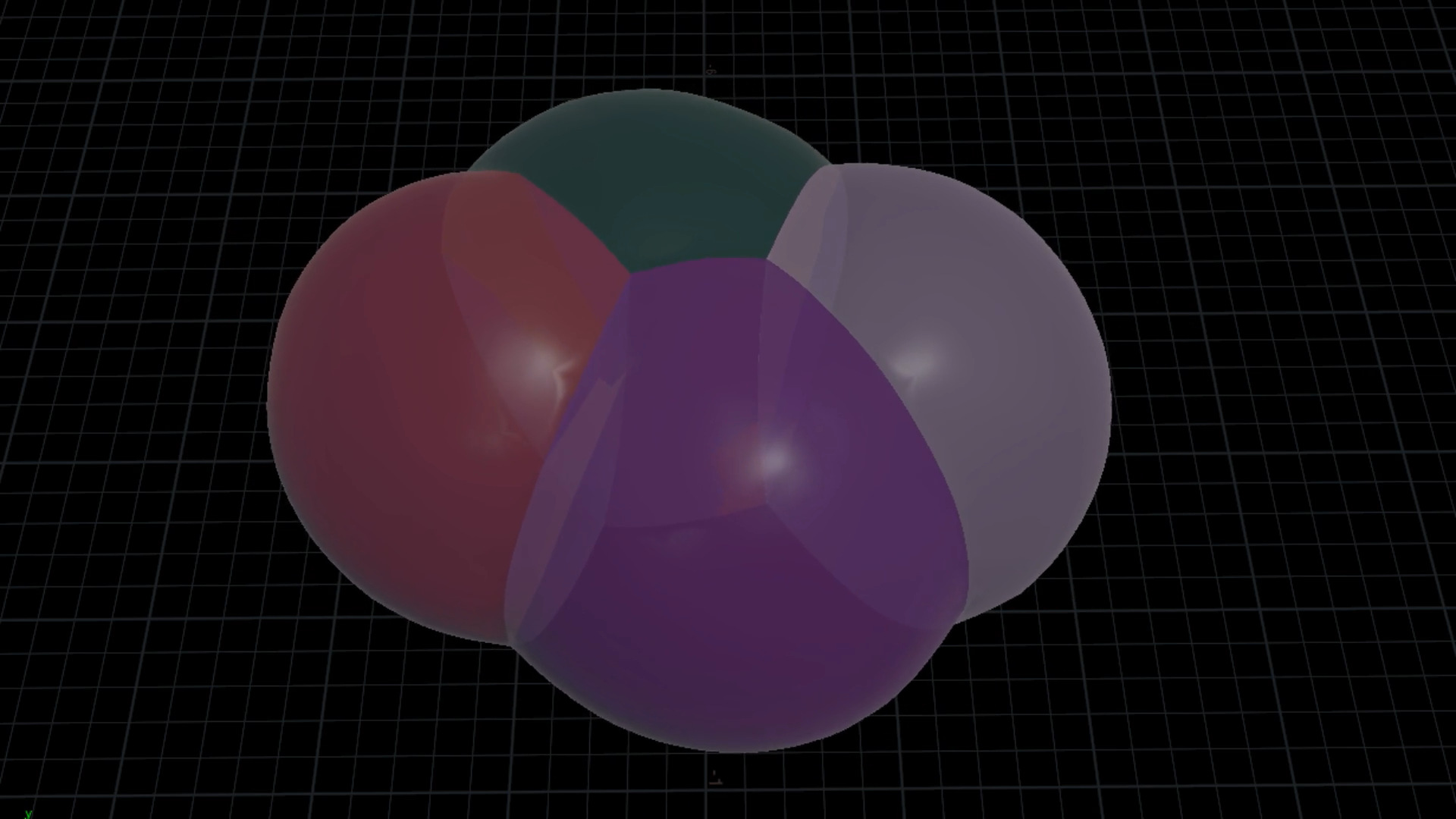
Learn how to support rendering of multiple volumes in a path tracer
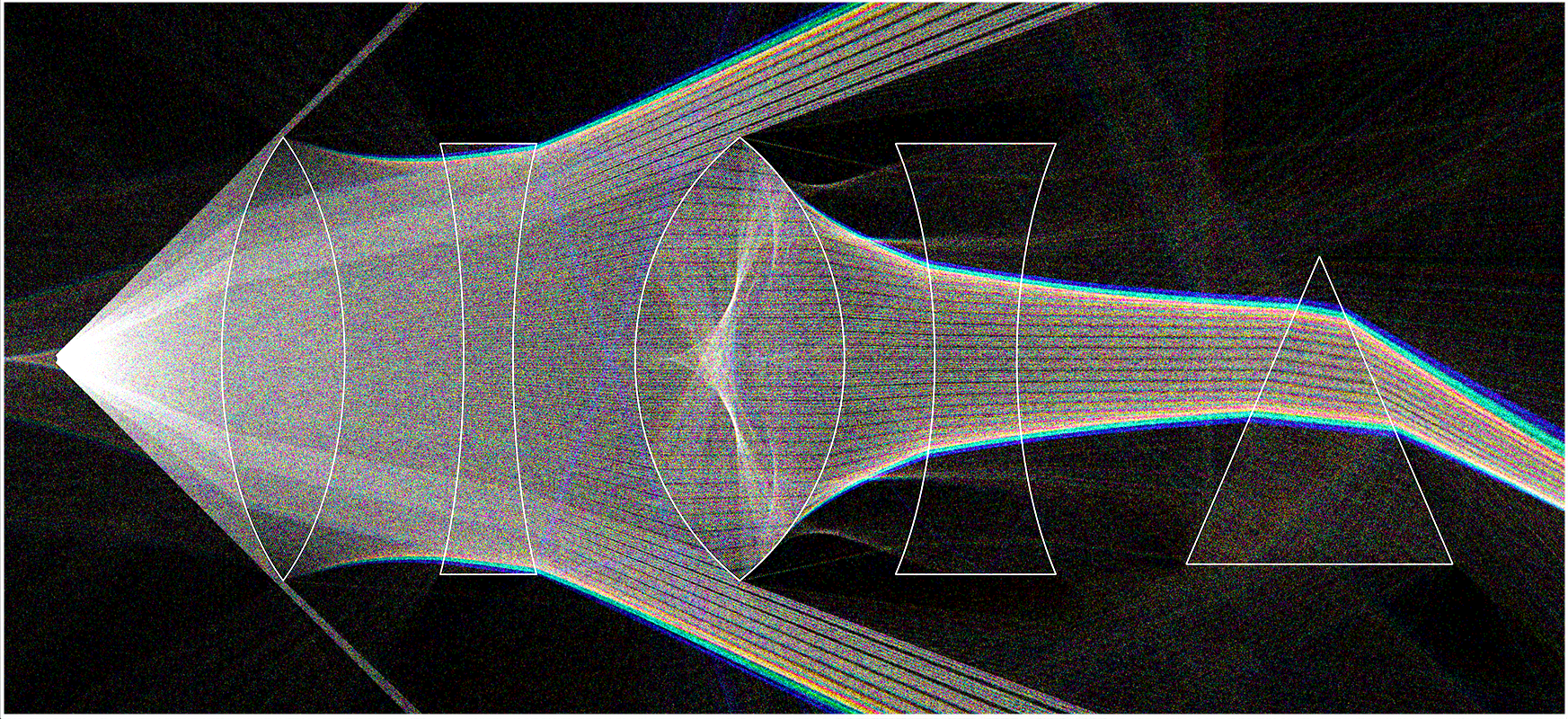
Introducing the Bubbleᴴ, A wrapper for siggraph paper "Double Bubble Sans Toil and Trouble"
Learn how to create a path tracer using houdini particles
Take a look at my drone collection
Learn how to light and render cloudscapes with Houdini and Arnold
Learn how to create high altitude clouds with Houdini
Learn how to create low altitude clouds with Houdini